
Portable Inertial Navigation System for Total Hip Arthroplasty
Overview
Total Hip Arthroplasty (THA) is a critical procedure for treating end-stage hip disorders. While the Direct Anterior Approach (DAA) is gaining popularity for its minimally invasive nature and faster recovery times, precise prosthesis placement remains a challenge. Traditional navigation methods like CT are costly, complex, and involve radiation exposure.
This project introduces a novel, portable, and wireless Inertial Navigation System (INS) tailored specifically for DAA THA. The system provides real-time, radiation-free quantification of acetabular cup orientation—specifically the Radiographic Anteversion (RA) and Radiographic Inclination (RI) angles—helping surgeons achieve optimal implant positioning.
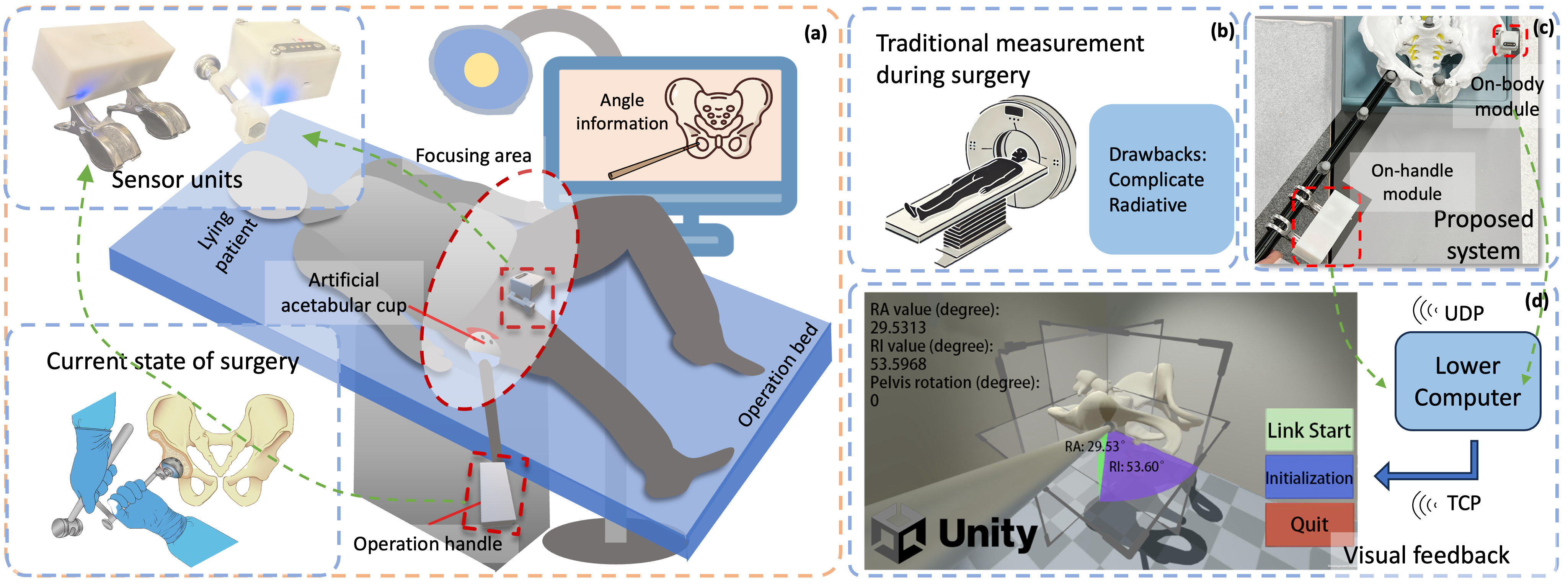
Fig 1: The proposed system in a surgical setting versus traditional methods.
System Architecture
The system integrates custom hardware and software to ensure seamless clinical workflow:
1. Hardware Design
The system consists of two compact, wireless sensor modules designed with integrated circuitry and sanitizable housing:
- On-Body Module: Attached to the Anterior Superior Iliac Spine (ASIS). It utilizes a gyroscope to monitor pelvic rotation and ensure the reference frame remains consistent.
- On-Handle Module: Attached to the cup impact handle. It features a 9-axis IMU (Accelerometer, Gyroscope, Magnetometer) to track the handle’s pitch and yaw in real-time.
Both modules utilize ESP32 MCUs for high-speed Wi-Fi data transmission and feature magnetic contact charging for ease of use in sterile environments.
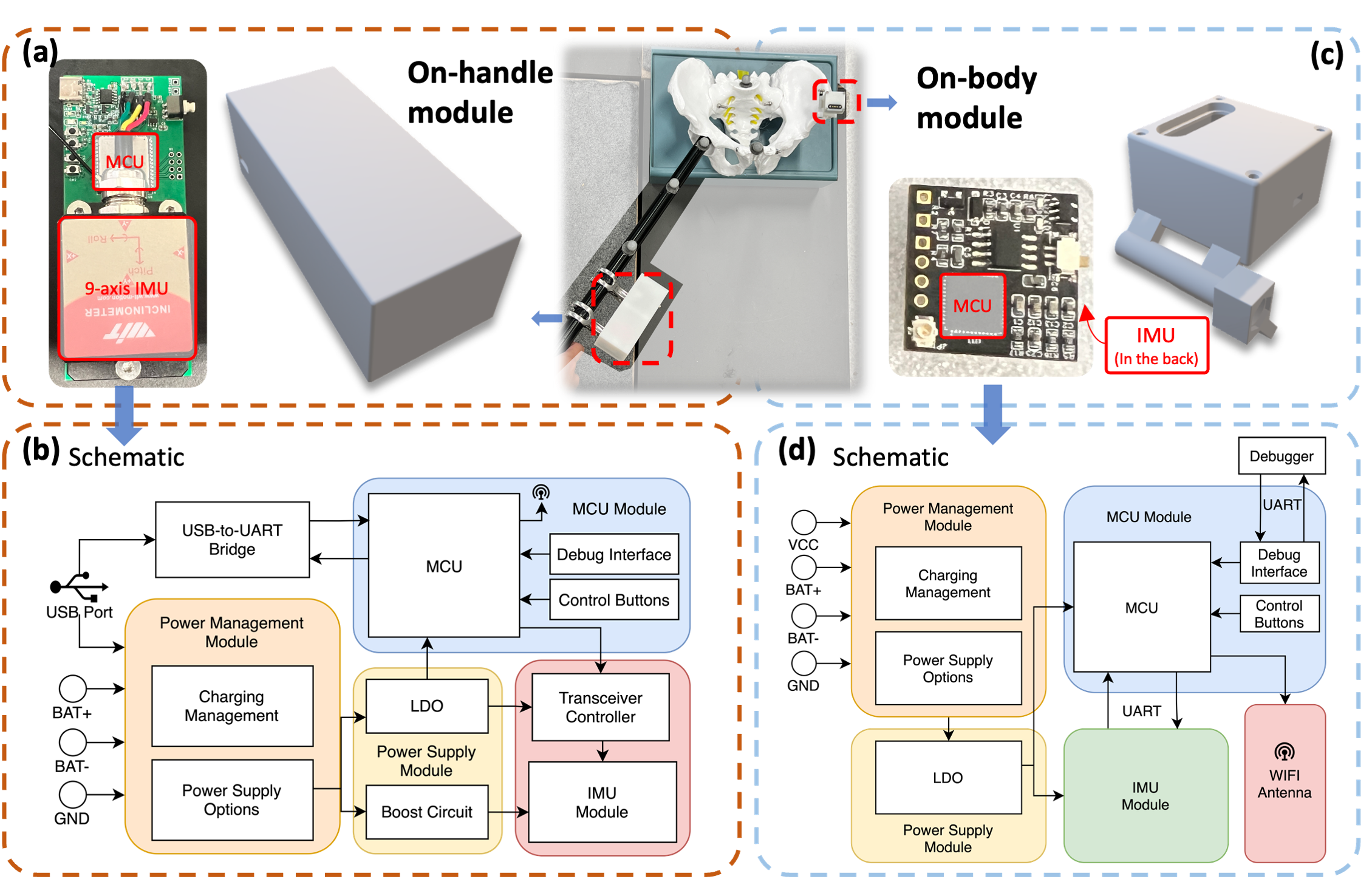
Fig 2: Integrated On-Handle and On-Body Sensor Modules
2. Software & Visualization
Data is transmitted via UDP to a host computer running a custom Unity 3D application. This provides surgeons with:
- Real-time numerical feedback of RA and RI angles.
- A 3D visualization of the pelvic model and instrument orientation.
- Color-coded “safe zones” to guide placement accuracy.
Experimental Design
To ensure clinical viability, the study employed a rigorous two-phase validation protocol, testing the system at both the individual sensor level and the full system level.
Phase 1: Sensor Validation (Robotic Reference)
The fundamental accuracy and stability of the sensors were evaluated using a high-precision commercial robotic arm (GLUON-6L3) as the ground truth.
- Static Validation: Sensors were rotated in discrete 5° increments from 0° to 90° across all three Degrees of Freedom (DoF) to measure mean error and standard deviation.
- Dynamic Validation: The robot executed sinusoidal motion profiles at varying angular velocities (from π/8 to π/20 rad/s). We calculated the Root Mean Square Error (RMSE) to assess performance under motion.
- Stability Testing: A 5-minute continuous operation test simulated the typical measurement window of a DAA surgery to quantify sensor drift and reliability.
Phase 2: System Validation (Model Simulation)
A realistic surgical simulation was conducted to validate the calculation of RA and RI angles in a clinical-like setup
- Setup: An Optical Motion Capture (OMC) system (Raptor-4S) was used as the “gold standard” reference. Markers were placed on a plastic pelvic model and the surgical tools.
- Procedure: The operator performed a standardized trajectory simulating the cup impact process: aligning with the central axis, rotating approximately 60° along the Z-axis, and then 60° along the X-axis.
- Evaluation: The RA and RI angles calculated by our INS were compared against the OMC reference data to determine the cumulative probability distribution of absolute error.
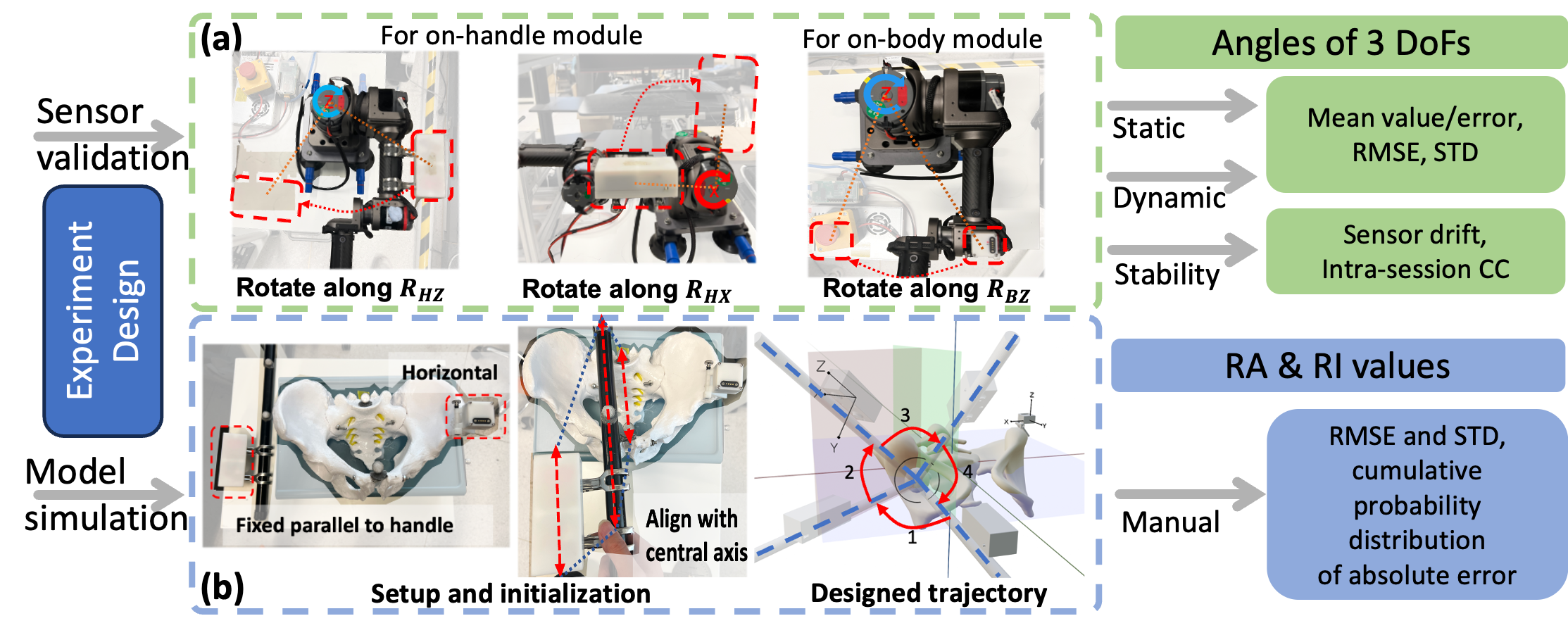
Fig 3: Experimental setup showing (a) Sensor validation with robotic arm and (b) System validation with Optical Motion Capture.
Validation & Results
The system was rigorously validated through sensor-level experiments (using a robotic arm) and system-level simulations (using a pelvic model and Optical Motion Capture as ground truth).
Key Performance Metrics
- Accuracy: The system achieved a Root Mean Square Error (RMSE) of 1.24° for RA and 1.89° for RI.
- Reliability: Intra-session correlation coefficients (CC) exceeded 0.995.
- Stability: Dynamic sensor drift was measured at less than 0.13°/min, ensuring consistent performance throughout typical surgical durations.
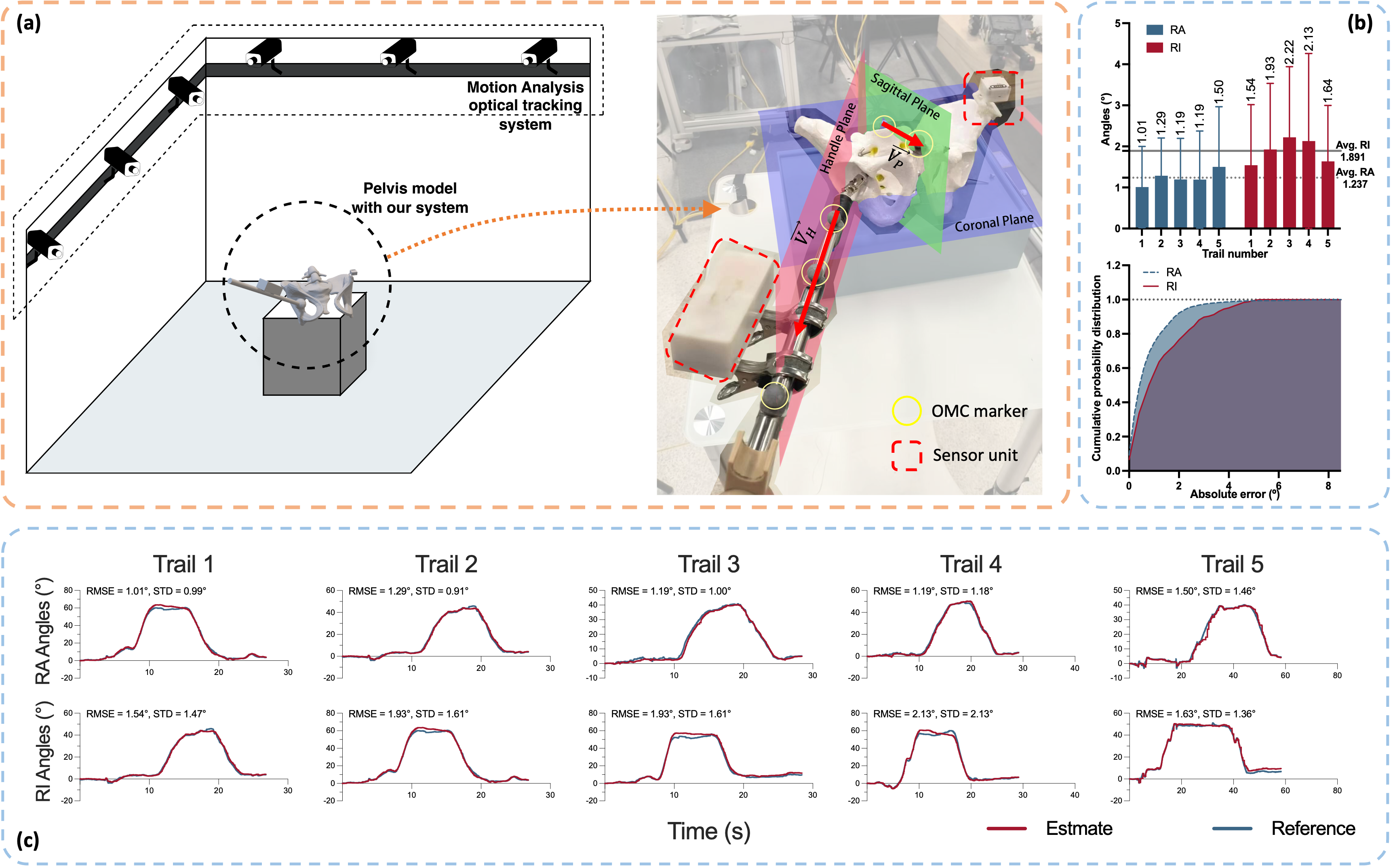
Fig 4: Dynamic validation showing minimal error compared to optical motion capture references.
Demo Video
Real-time visualization of cup orientation during model simulation.
Achievements
This work was published in IEEE Transactions on Instrumentation and Measurement (2025). This work is also patented under CN Patent No. CN118870291A. This work was funded by Shenzhen People Hospital with $15,000 USD.
Citation:
C. Gu, Y. Yu, X. He, L. Zhang, Z. Xi, Y. Liu, G. Li, and M. Zhang, “A Portable Inertial Navigation System for Total Hip Arthroplasty Targeting Direct Anterior Approach,” in IEEE Transactions on Instrumentation and Measurement, vol. 74, 2025.