
Design and Modeling of a Polymer-based Hydraulic Continuum Robot
Overview
Minimally Invasive Surgery (MIS) relies on tools that can navigate complex anatomical pathways without causing trauma. While continuum robots offer inherent compliance and steerability, actuating them at the meso-scale (millimeter scale) remains challenging. Tendon-driven systems suffer from friction, and magnetic systems require bulky external setups.
This project presents a hydraulically actuated polymer-based continuum robot with an outer diameter (OD) of just 2.14 mm. By utilizing hydraulic pressure within a custom-fabricated actuator, the robot achieves large bending angles and smooth motion. The research focuses on optimizing force transmission, minimizing undesirable twisting effects (“screw motion”), and accurately modeling the non-linear hysteresis inherent in soft actuators.
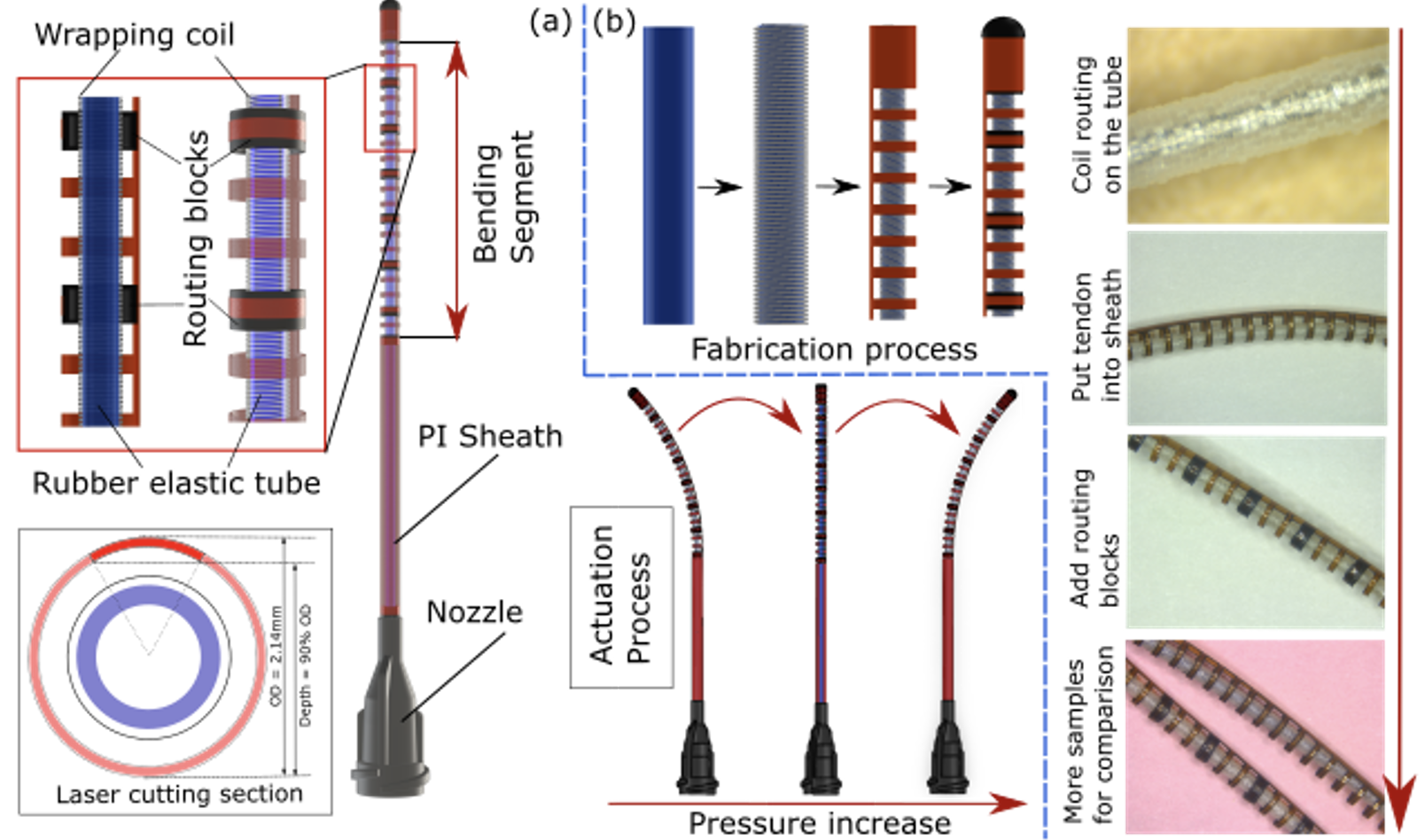
Fig 1: (a) CAD model of the joint showing the routing blocks and notched sheath. (b-d) Fabrication process of the coiled hydraulic actuator.
System Design
The robot is constructed from MRI-compatible materials to ensure future clinical viability:
- Outer Sheath: A laser-micromachined Polyimide (PI) tube with a Unidirectional Asymmetric Notch (UAN) pattern to facilitate bending.
- Hydraulic Actuator: A silicone tube wrapped in a helical polymer coil (fishing line) to constrain radial expansion and promote linear extension.
- Routing Blocks: 3D-printed blocks placed internally to constrain the actuator to the centerline, ensuring efficient force transmission.
Twist Reduction Analysis

Fig 2: Experimental comparison showing the significant reduction in twisting angle (d) and out-of-plane Z-displacement (e) for the proposed S3 design.
A common issue with coiled hydraulic actuators is "screw motion" — unwanted twisting during extension. We compared three design variations:
- S1: Actuator fixed at the tip, no routing blocks.
- S2: Actuator fixed at the tip, with routing blocks.
- S3 (Proposed): Actuator floating at the tip (unaffixed), with routing blocks.
Result: The proposed design (S3) reduced joint twisting by 58.8% compared to the fixed-tip designs, achieving dominant planar bending with minimal out-of-plane motion.
Hysteresis Modeling
Soft polymer actuators exhibit significant hysteresis (a lag between input force and output bending). To enable precise control, we implemented a Preisach Hysteresis Model.
- Calibration: The model was trained on cyclic loading/unloading data.
- Performance: The model predicted tip deflection with a Root Mean Square Error (RMSE) of just 2.26° across validation trials with varying bending amplitudes.
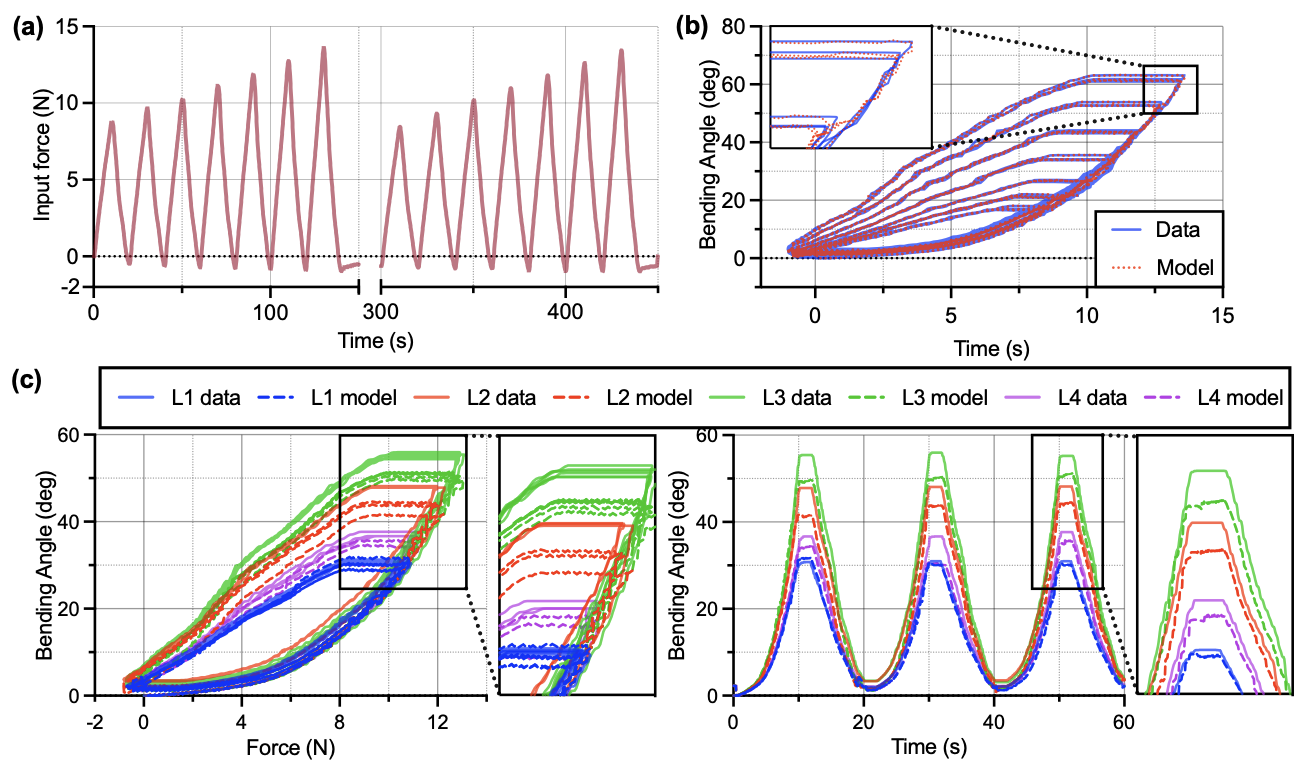
Fig 3: (First row) Preisach model fitted to training data. (Second row) Validation of the model against different loading profiles, showing accurate tracking of the bending angle.
Phantom Demonstration
To demonstrate clinical relevance, the robot was navigated through a 2D aortic arch phantom. The joint successfully negotiated tortuous paths, navigating through the vessel bifurcations and achieving tip deflections greater than 180°.
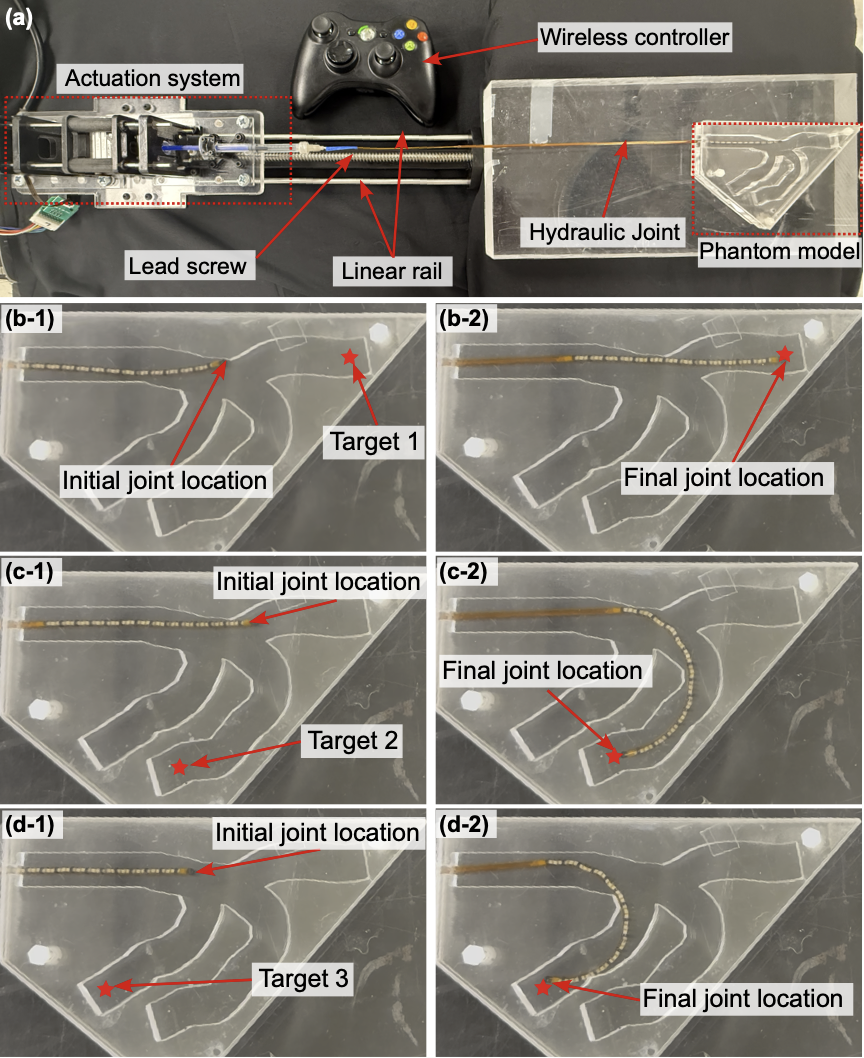
Video: Navigation through the aortic arch phantom.
Publication
This work was presented at the 2026 International Symposium on Medical Robotics (ISMR), where it received the Best Student Paper Award.
Citation:
C. Gu, T. A. Brumfiel, N. Malhotra, and J. P. Desai, “Design and Modeling of a Polymer-based Hydraulic Continuum Robot for Minimal Invasive Surgery,” in 2026 International Symposium on Medical Robotics (ISMR), Atlanta, GA, USA, 2026.