
Deep Learning-Enhanced UWB-IMU Motion Capture System
Overview
Accurate motion capture is essential for medical diagnosis and rehabilitation, particularly for assessing gait and balance in Parkinson’s disease or post-stroke recovery. Traditional optical systems are expensive and spatially restricted, while standalone Inertial Measurement Unit (IMU) systems suffer from position drift over time.
This project presents a low-cost, full-scene motion capture system that fuses UWB (Ultra-Wideband) positioning technology with IMU data. By leveraging a Deep Learning framework (RNN), the system reconstructs full-body poses from sparse sensor nodes (only 6 sensors), achieving high precision suitable for home-based digital rehabilitation.
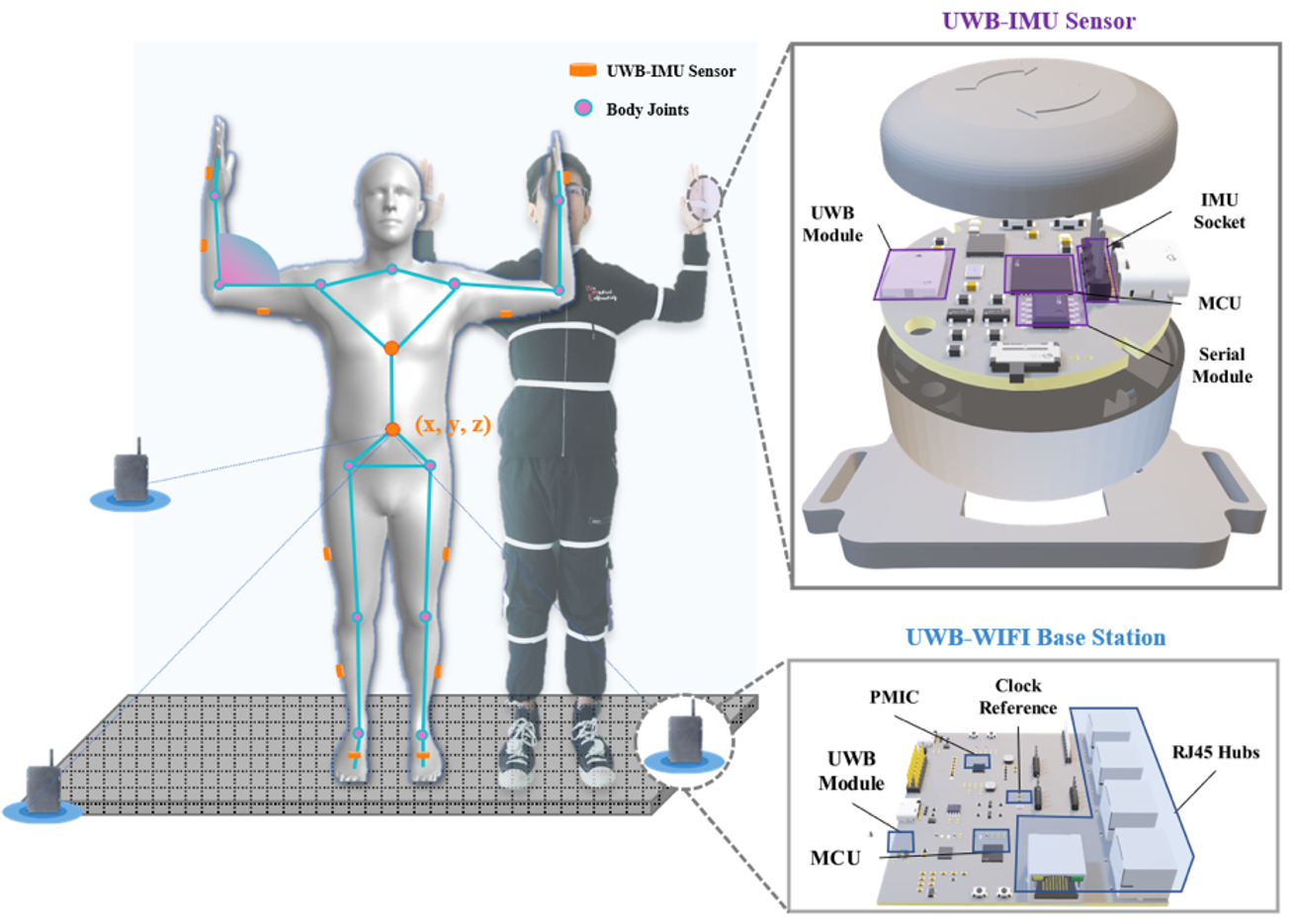
Fig 1: System architecture showing the fusion of on-body UWB-IMU sensors and the base station network.
System Hardware & Architecture
We developed a custom hardware ecosystem to support real-time, wireless data acquisition:
- Wearable Sensor Nodes: Integrated modules containing a 9-axis IMU and a UWB communication chip. These nodes are placed on 6 key body segments: Left/Right Forearms, Left/Right Lower Legs, Head, and Pelvis.
- Base Stations: A network of UWB anchors that synchronize via clock references to provide Time Difference of Arrival (TDOA) measurements.
- Communication Protocol: A custom wireless protocol manages the “Link Phase” (device discovery) and “Work Phase” (TDMA-based data streaming) to support multiple active tags simultaneously.

Fig 2: Custom UWB-IMU Sensor Node and Base Station Design.
Methodology: Fusion & Reconstruction
The core innovation lies in the multi-stage algorithmic pipeline that processes raw sensor data into a realistic 3D human pose.
1. UWB Positioning & Signal Classification
UWB signals are susceptible to Non-Line-of-Sight (NLOS) errors caused by body occlusion. We implemented:
- NLOS Classification: A threshold-based classifier analyzes the Received Signal Strength (RSS) and First Path power to identify and filter out unreliable NLOS signals (Accuracy: 72.4%).
- TDOA Calculation: The CHAN algorithm computes the initial 3D coordinates of each tag based on time-difference measurements.
2. Sensor Fusion (Kalman Filter)
To mitigate IMU drift and UWB jitter, we employed an Kalman Filter (KF). The IMU acceleration drives the state prediction, while UWB position data serves as the measurement update.
- Result: The fusion significantly reduced noise, achieving a Root Mean Square Error (RMSE) of 4.64 cm even under simulated noise conditions of 10 cm.
3. Deep Learning Pose Reconstruction
We designed a Recurrent Neural Network (RNN) framework to map sparse sensor data to a full-body SMPL model:
- Input: A 72-dimensional vector combining normalized IMU data (acceleration + rotation) and corrected leaf node positions (from the EKF fusion).
- Architecture: Two stacked RNNs. RNN1 estimates the positions of all joints, and RNN2 converts these positions into joint rotation matrices for the SMPL model.
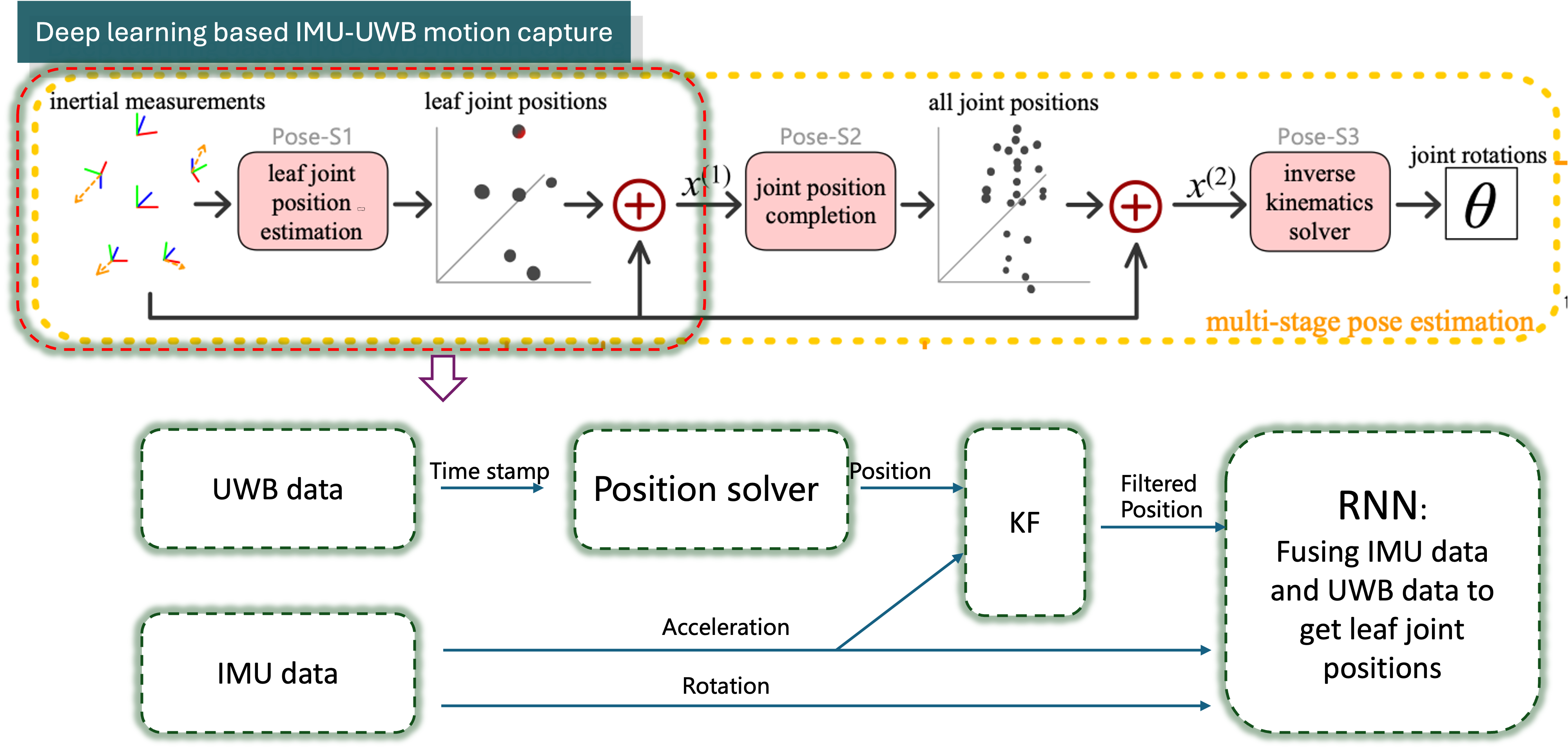
Fig 3: The pipeline flowing from raw UWB/IMU data through the EKF and RNN to output the final human pose.
Experimental Results
IMU-UWB Kalman filter fusion positioning results
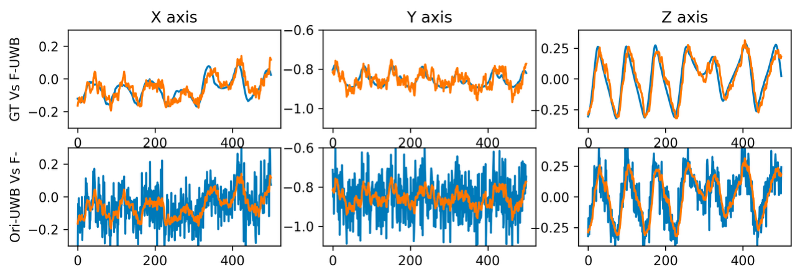
Fig 4: The first row compares the ground truth (blue) with the filtered UWB data (orange), and the second row compares the unfiltered UWB (blue) with the filtered one (orange).
Deep Learning Motion Reconstruction Results
The system was evaluated using the DIP-IMU dataset and simulated UWB noise profiles. Our method (“Ours UIP*”) was benchmarked against state-of-the-art methods like TransPose and DIP.
Performance Comparison
Our fused approach demonstrated superior tracking accuracy, particularly in global positioning, which is a common weakness in IMU-only systems.
| Method | SIP Err (°) | Angle Err (°) | Pos Err (cm) | Mesh Err (cm) | Jitter (km/s³) |
|---|---|---|---|---|---|
| DIP | 15.16 | 15.16 | 8.96 | 7.33 | - |
| TransPose | 16.68 | 8.85 | 5.95 | 7.09 | 1.46 |
| TIP | 5.49 | 16.20 | 9.17 | 6.61 | - |
| Ours UIP* | 9.63 | 6.31 | 3.48 | 4.03 | 0.42 |
- Lowest Position Error: 3.48 cm (vs. 5.95 cm for TransPose).
- High Stability: Lowest jitter score (0.42), indicating smooth motion reconstruction essential for clinical analysis.
Conclusion
This project successfully demonstrated a prototype for a full-scene rehabilitation motion capture system. By combining the absolute positioning of UWB with the high update rate of IMUs via a deep learning framework, we achieved a low-cost, high-accuracy solution that outperforms existing sparse-IMU methods in positional tracking.
Demo Video
Achievements
This work is also patented under CN Patent No. CN118634071A. This work won a $3,000 Innovation and Entrepreneurship Grant.